MCT126 is a high-performance synchronous controller designed with FPGA and high-speed processor architecture. Its role includes synchronization control and positioning control. Can control servo, inverter and DC drive systems.
The introduction of optical encoder signals can not only achieve speed synchronization, but also control the angle of rotation of the motor through encoder pulse counting to achieve angular synchronization. The precise synchronization and flying shear control can be achieved in the dynamic process. The synchronous positioning accuracy can be within several encoder pulses and can be adapted to various high-speed and high-precision control requirements.
MCT126 can fully meet the requirements of speed synchronization, angle synchronization and process constant tension control of various equipments and production lines. Widely used in cross cutting, die cutting, printing, printing and dyeing, compounding, spinning, winding, transmission and other equipment and occasions.
Synchronous control
As shown in Fig. 1, the command of the main motor is input from the outside, and the slave motor is completely controlled by the MCT 126 in the set mode. MCT126 outputs the analog voltage from -10V~+10V to the slave motor driver, and receives the pulse feedback signal of the photoelectric encoder of the master-slave motor. It controls the slave motor's full-closed speed and position to realize the absolute synchronization of the master and slave motors. The average encoder phase error is about ±5 pulses, so the MCT126's synchronization error can be up to ±5 encoder pulses
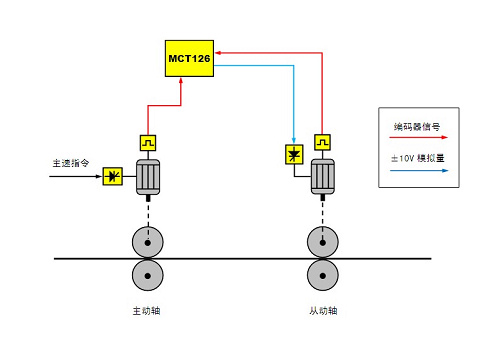 figure 1
figure 1
In practical applications, the roller diameter and deceleration ratio of the master and slave axes are not equal, so the speed ratio of the master-slave motor is not necessarily 1. By adjusting the parameters, the MCT126 can achieve synchronous control of any speed ratio.
In the course of running, if there is no error, the synchronous phase of the master-slave motor will remain. If an external control signal (pulse, level, or analog voltage) is applied to the MCT 126, the synchronous phase of the slave motor can be adjusted in real time. With this function, the MCT126 can be used with a register controller (such as the MCT205) for applications that require real-time tracking and correction of phases, such as non-shaft printing, index cutting, etc.; it can also be combined with a reciprocating tension feedback device. Achieve constant tension control.
[tension control]
The MCT126 provides easy access to synchronous applications where tension control is required. MCT126 unique analog phase trim mode, can receive tension feedback signal, self-control material tension, without adding an additional tension controller to control the tension after synchronization.
When this mode is applied, the tension signal (analog voltage) of the material needs to be fed back to the MCT 126 with a tension feedback device (such as a pendulum roller, a pressure sensor, etc.). as shown in picture 2.
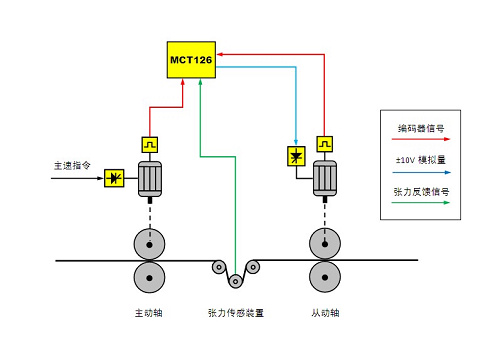 figure 2
figure 2