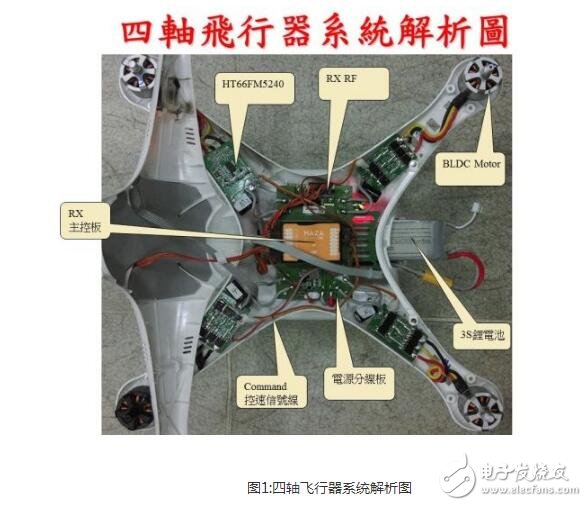
At this year's CES, drones became one of the biggest hot spots in the show. DJI, Parrot, 3D RoboTIcs, AirDog and other well-known drone companies all showcase their latest products. Even Intel and Qualcomm booths exhibited aircraft with powerful communications and the ability to automatically avoid obstacles. UAVs have quickly become a phenomenal hot product in 2015, and we haven't even had time to study it. To this end, the magazine interviewed a number of companies to understand the hardware structure of the drone and its future technological developments. (Note: The drone in this article also refers to the multi-axis aircraft (Drone). Compared with the fixed-wing drone, the multi-axis aircraft is more stable and can hover in the air. The hardware structure of the host is as follows Figure.

These are just anatomical maps of standard products. Some of the more advanced ones, such as the UAV system for RC enthusiasts and aerial users, require more modules such as pan/tilt, camera, video transmission system and video reception.
Flight Controlled Brain: MicrocontrollerOn the flight control board of the quadcopter, there are not many chips to be used. The current toy-class aircraft is simply flying or staying in the air. As long as it can receive the commands sent by the remote control and control the four motors to drive the blades, the flight or hover function can basically be realized.
Ren Yuan, senior engineer of STMicroelectronics, introduced that the main components of the UAV/Multi-Axis aircraft include flight control and remote control. Flight control includes ESC/motor control, aircraft attitude control, and pan/tilt control. At present, the mainstream ESC control methods are mainly divided into BLDC square wave control and FOC sine wave control. STMicroelectronics' STM32F051 and STM32F301 series are widely used in the industry due to their high integration, small package and excellent value for money. In terms of aircraft attitude control, depending on the external sensor, ST can provide different series of STM32F0/STM32F3/STM32F4 to meet the needs of customers. For the control of pan/tilt, STM32F301/STM32F302/STM32F405 series have also been widely used in customers' aerial photography products. In addition, in terms of the remote control, in addition to the STM32F0/STM32F1 series used in the traditional type without display, the STM32F429 is gradually being used in the remote control with color display due to the built-in TFT color screen driver.
Xintang's MCU official said: The multi-axis aircraft consists of different modules such as remote control, flight control, power system, aerial photography, etc. According to the requirements of different grades, different CPU cores from 8051, Cortex-M0, Cortex-M4 to ARM9, Nuvoton has a number of MCUs that are used in multi-axis aircraft: for example, a small four-axis flight master. Due to its simple function and small size, it must integrate remote control reception, flight control and power drive functions in QFN33 or TSOP20 packages. Cortex-M0 MINI54 series; medium and high-end multi-axis aircraft with Cortex-M4 M451 series with built-in DSP and floating-point arithmetic unit, responsible for flight master control function, ESC board for driving brushless motor adopts MINI5 series design . The low-end remote control uses the 4T 8051 N79E814 in the SOP20 package; the mid- to high-end remote control uses the Cortex-M0 M051 series. In addition, the N329 series SOC with built-in ARM9 and H.264 video edge decoders is used in 2.4G and 5.8G aerial photography systems.
On the flight control board, the MCU is used instead of the CPU for control and processing. Since the flight control is mainly floating point operation, the simple ARM Cortex-M4 core 32-bit MCU can be well satisfied. Some sensor MEMS chips have integrated DSP, and with this, a simpler 8-bit microcontroller can do it.

At CES this year, we saw Qualcomm and Intel showcased more feature-rich multi-axis aircraft. They used a more powerful CPU than the microcontroller (MCU) or ARM Cortex-A series processor as the main control chip.
In addition, XMOS, a European processor manufacturer active in the robot market, has also indicated that it has entered the field of drones. Dr. Paul Neil, vice president of marketing and business development at XMOS, said XMOS' xCORE multicore microcontroller family has been adopted by OEM customers of some UAV/multi-axis aircraft. In these systems, XMOS multicore microcontrollers are used for both flight control and MCU internal communication.
Paul Neil said: xCORE multicore microcontrollers have between 32 and 32 32-bit RISC cores with frequencies up to 500MHz. xCORE devices also come with a Hardware Response I/O interface that provides superior hardware real-time I/O performance with low latency. "This multi-core solution supports fully independent execution of system control and communication tasks without any real-time operating system (RTOS) overhead. The hardware real-time performance of the xCORE microcontroller enables our customers to implement very precise control algorithms while There is no jitter in the system. These advantages of the xCORE multicore microcontroller are key to attracting high-reliability, high-real-time application users such as drones/multi-axis aircraft."
STMicroelectronics also revealed that the STM32F7 series uses the latest generation Cortex-M7 architecture, combining high performance, real-time functions, digital signal processing, and high integration to provide solutions for aircraft customers with high precision control. The STM32 Dynamic Efficiency microcontroller family strikes the perfect balance between dynamic power and processing performance to make the aircraft design perfect.
Multi-axis aircraft require four to six brushless motors (motors) to drive the rotors of the drone. The motor drive controller is used to control the speed and direction of the drone. In principle, a motor needs to be equipped with an 8-bit MCU for control, but the author also sees an MCU to control multiple BLDC motors.

Chen Yimin, general manager of UAV solution company Shenzhen Fuwei Kechuang Electronics Co., Ltd. believes that although most of the current toy-grade aircraft in the industry have been upgraded from three-axis to six-axis MEMS, they usually use consumer products such as tablets or mobile phones. More commonly used price sensitive models. In professional aerial photography and mid- to high-end drones developed specifically for RC enthusiasts, more quality sensors are used to ensure a more stable and safe flight of the drone.
Zhao Yanhui, ADI Asia Pacific MEMS product and application manager, introduced ADI's industrial grade gyros ADXRS652, ADXRS620, ADXRS623, ADXRS646, ADXRS642 and other industrial accelerometers ADXL203, ADXL278, etc. are widely used in professional-grade aerial equipment. Commercial grade accelerometers ADXL335, ADXL326, ADXL350, ADXL345, etc., have also been widely used in all-in-one machines and various aircraft.
These MEMS sensors are mainly used to achieve smooth control and assisted navigation of the aircraft. The reason why the aircraft can hover can be used for aerial photography because the MEMS sensor can detect the pitch and roll angle changes of the aircraft during flight. After detecting the angle change, the motor can be controlled to rotate in the opposite direction to stabilize. Effect. This is a typical closed loop control system. As for measuring the change of angle with a MEMS sensor, it is generally necessary to select a combined sensor, which cannot rely solely on an accelerometer or a gyroscope alone, because each sensor has certain limitations. For example, the gyroscope outputs angular velocity. It is necessary to obtain the angle through integration. However, even in the zero input state, the gyro still has an output, and its output is a superposition of white noise and slowly varying random functions. In the process of integration, the cumulative error will inevitably be introduced. The longer the integration time, the larger the error. This requires an accelerometer to correct the gyroscope, because the accelerometer can use the force decomposition principle to determine the tilt angle by the component of gravity acceleration in different axial directions. Since there is no integral error, the accelerometer can correct the gyroscope error under relatively static conditions. However, in the state of motion, the credibility of the accelerometer output is reduced because it measures the resultant force of gravity and external force. A more common algorithm is to use complementary filtering, combined with the output of the accelerometer and gyroscope to calculate the angular change.
As the functions of drones continue to increase, GPS sensors, infrared sensors, air pressure sensors, and ultrasonic sensors are increasingly being used on drones. Solution providers have been using infrared and ultrasonic sensors to develop drones that can automatically avoid collisions to meet future regulatory requirements. The drone with integrated GPS sensor can realize the one-button return function to prevent the drone from flying. The built-in GPS-enabled drone can set sensitive locations close to the airport or air restrictions in the software to prevent the aircraft from taking off.

As an entertainment-class drone, it may only need to use the transmission remote control technology, 2.4GHz or 5.8GHz wireless remote control can be satisfied. Although the 433MHz band has strong penetrability and long communication distance, it can transmit up to 2 kilometers, but due to its weak anti-interference ability, it is not used in remote drones or aircraft. 2.4GHz or 5.8GHz wireless RF chips are available from many chip manufacturers, and have been used by remote control toy manufacturers for a long time.
Because the multi-axis drone can fly very stably, after wearing the pan/tilt and camera, it can shoot video in the sky and transmit it to the ground through wireless communication (5.8G, WIFI or LTE), which is more widely used. Pan Jianzhang, director of the product technology development department/motor product technology department of Hetai Semiconductor, believes that four-axis aerial vehicles have been used for a small number of purposes (traffic monitoring, atmospheric monitoring, urban planning, border patrol, disaster monitoring, monitoring of agricultural crop growth and pests and diseases). , precision spraying of pesticides, frontier cruises, urban anti-terrorism, etc.), began to move towards mass consumers (aviation), becoming a smart hardware commodity.
In terms of video transmission of drones, Shenzhen DJI DJI drones have long been the leader in the aerial drone market. They can wirelessly transmit 1080P HD video, which is a problem that many other domestic entertainment drone manufacturers have not solved yet. The general practice is to carry a camera on the PTZ, fly at high altitude and fly back to the ground for inspection. This method cannot meet the requirements of aerial photography because the picture cannot be seen immediately. Chen Yimin introduced that there are many programs that use the 5.8 GHz band to transmit analog video to the ground, and the farthest distance can reach more than 600 meters. However, this method requires transcoding HD (1080P or 4K) into 720P on the aircraft, and then converting it into a digital signal for transmission to the remote control display screen, which is technically complicated, and the picture may be mosaic, paused or stuck. The picture quality is not good enough, and the professional aerial photography and distance are used, which is suitable for ordinary fans to entertain.
At present, professional WiFi chip manufacturers have not developed such long-range wireless high-definition video transmission chips, including Broadcom and Qualcomm. But the drone market is so hot, wireless chip makers are already planning to launch dedicated chips. "In the future we will see a dual-mode chipset that can simultaneously establish links with controllers and displays," said Broadcom Brian Bedrosian.
Prior to the introduction of the dedicated chip, a method of using software-defined radio solved the contradiction between wireless long-distance and high-bandwidth transmission. Prior to the advent of Analog Devices' Software Defined Radio (SDR) technology, RF engineers were able to implement long-distance, high-bandwidth wireless transmissions through discrete devices, but the solution was complex and costly, and the development time was too long to be suitable for consumption. Class of products.

Although the future of drones is consistently optimistic, in reality drones still face many technical challenges, including battery life bottlenecks, more efficient rotor design, more remote control and communication, and software. More convenient control to popularize products and so on. The technical challenges in these areas are likely to be solved with the continuous investment of many companies in the development of drones, but there is still a real problem that plagues drones, especially professional aerial camera drone manufacturers.
Professional aerial drones are priced at up to 10,000 RMB, and are also equipped with high-end cameras or cameras. In the course of use, even if there is a failure, causing the drone to crash, it will bring significant losses to the consumers, even the personal safety of the ground personnel. In the professional forum, the drone crashes that are called “fried machines†by enthusiasts are constantly happening. Professional aerial photography manufacturers have the biggest headache for this. The main reason is that even if there is an accident video or even a “wreckâ€, the technology The person cannot judge the real cause of the accident.
With more than 15+ yrs rich MFG experience, you can definitely trust in and cooperate with.
Provide you with the supply of personal protective equipment. to help you safely get back to your daily routine.
Our products include pulse Oximeter Finger, Forehead Thermometer, Automatic foam soap dispenser, etc.
Our strict quality control protocol thoroughly vets every aspect of production, storage, and shipments all the way way to our end customers.
protective equipment, ppe personal protective equipment, definition of personal protective equipment
TOPNOTCH INTERNATIONAL GROUP LIMITED , https://www.micbluetooth.com