Servo (English called Servo) It consists of a set of automatic control systems consisting of a DC motor, reduction gears, sensors, and control circuits. By sending a signal, specify the output shaft rotation angle. In general, servos have a maximum rotation angle (for example, 180 degrees). The main difference between conventional servos and DC motors is that the DC motor rotates in a circle, and the servo can only rotate within a certain angle, and cannot rotate in a circle ( Digital servos can be switched between servo mode and motor mode without this problem). Ordinary DC motors cannot feed back the angle of rotation information, and the servo can. The purpose is also different. Ordinary DC motors are generally powered by full rotation, and servos are used to control the rotation of a certain object (such as the joints of a robot).
This article first introduced the structure of the steering gear, followed by a description of how the signal line of the steering gear was distinguished and its role. Finally, the specification and selection of the steering gear were introduced, and the specific details of the steering gear were followed.
Steering mechanismThe steering gear is mainly composed of a housing, a circuit board, a drive motor, a speed reducer, and a position detection element. The working principle is that the receiver sends a signal to the steering gear. The coreless motor starts to rotate through the IC on the circuit board. The power is transmitted to the swing arm through the reduction gear, and the signal is sent back from the position detector to determine whether it has arrived. Positioning. The position detector is actually a variable resistor. When the servo rotates, the resistance value will change. By detecting the resistance value, the angle of rotation will be known.
The general servo motor is a thin copper wire wound on the three-pole rotor, when the current flows through the coil will produce a magnetic field, and the rotor around the magnet to produce a repulsive effect, and then produce a rotating force. According to the principle of physics, the moment of inertia of the object is proportional to the mass, so the greater the force required to rotate the object, the greater the force required. The steering gear requires fast rotation and low power consumption, so the thin copper wire is wound into a very thin hollow cylinder to form an extremely light hollow electrodeless rotor and the magnet is placed inside the cylinder. This is the hollow cup motor.
In order to adapt to different working environments, there is a waterproof and dustproof steering gear design; and in response to different load requirements, the gear of the steering gear has the distinction between plastic and metal. The steering gear of metal gears are generally high-torque and high-speed type. Gears do not collapse due to excessive load. Higher rudder opportunities with ball bearings allow for quicker and more precise rotation. The difference between a ball bearing and two, of course, two is better. At present, the new FET servos mainly use FET (Field Effect Transistor) field effect transistors. The FET has the advantage of low internal resistance, so the current loss is less than that of a normal transistor.
How to distinguish the servo signal line
The signal line is connected to the I/O port of the single-chip microcomputer. Since there is a drive circuit inside the servo, it can be directly controlled by an ordinary single-chip I/O port;
Positive power supply, connected to the positive input power supply;
Ground wire, connect the negative pole of input power;
Note: If the control section and the power section are separate, they must be common ground.
What is the use of the servo signal line?The servos are distinguished by the color of the signal line. The middle red line is the positive pole of the power supply, the brown line is the negative pole of the power supply, and the remaining orange line is the control line.

The steering gear used today has the analog steering gear and the digital steering gear (see Section 3 for specific differences), but there are still relatively few digital steering gears. The following technical specifications apply to both servos.
The specifications of the steering gear mainly include several aspects: speed, torque, voltage, size, weight, and material. When we are doing steering gear selection, we must consider the above aspects comprehensively.
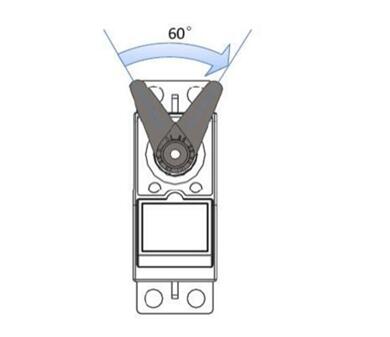
Rotating speed:
The speed is turned 60 by the servo under no load. Measured by the time required for corners, the speed of common steering gear is generally between 0.11/60'~0.21S/60^.
Torque
The unit of servo torque is KG.CM, which is a unit of torque. It can be understood as the weight of the object that can be driven by the servo at a horizontal distance of 1 cm from the axis of the servo on the rudder.

Voltage:
The speed and torque data provided by the manufacturer are related to the test voltage. There are large differences between the two parameters under the test voltages of 4.8V and 6V. For example, Futaba S-9001 has a torque of 3.9kg and a speed of 0.22 seconds at 4.8V, a torque of 5.2kg and a speed of 0.18 seconds at 60V. Unless otherwise noted, JR's servos use 4.8V as the test voltage, and Futaba uses 6.0V as the test voltage.
The operating voltage of the servo has a significant impact on performance. The servo recommended voltage is generally 4.8V or 6V. Of course, some servos can work above 7V, such as 12V servos. Higher voltages can increase motor speed and torque. Selecting the servo also requires looking at the voltage that our control card can provide.
Size, weight and material:
The power ratio of the servo (speed X torque) and the size ratio of the servo can be understood as the power density of the servo, and generally the servo of the same brand has high power density and high price.
The gears of plastic gears may break when used under extreme loads, and the gears of metal gears may cause motor overheating or shell deformation. Therefore, there is no absolute preference for material selection. The key is to use servos within the design specifications.
Users generally rely on metal products. The gearbox is expected to be all-metal. The rudder is expected to select the metal rudder. However, it should be noted that metal gearboxes will not be damaged under long-term overload conditions. Ultimately, it is motor overheating damage or shell deformation. Such damage is fatal and cannot be repaired. The use of a metal rudder for a servo shaft out of a shaft is dangerous. When the rudder shaft and the rudder shaft are twisted together, the metal rudder plate will not wear and the rudder shaft will become bald after a certain period of time, resulting in rudder. Machine can not be used at all.
In summary, the choice of steering gear needs to select a servo with around 150% or more torque surplus under the condition of calculating the required torque and speed, and determining the voltage to be used.
Product categories of Vozol, we are specialized electronic cigarette manufacturers from China, Vapes For Smoking, Vape Pen Kits, Vape Cartridge, Smoking Accessories,E-Cigarette suppliers/factory, wholesale high-quality products of Modern E-Cigarette R & D and manufacturing, we have the perfect
after-sales service and technical support. Look forward to your cooperation!
vozol disposable vape,puff bar vozol vape,vozol bar disposable vape kit,pod vozol bar vape,vozol vape pen
Ningbo Autrends International Trade Co.,Ltd. , https://www.supervapebar.com