Lei Fengwang: According to author Bernt Øivind Børnich & Phuong Nguyen, source robohub, compiled by Lei Feng network (search "Lei Feng network" public number) exclusive compilation, refused to reprint without permission!
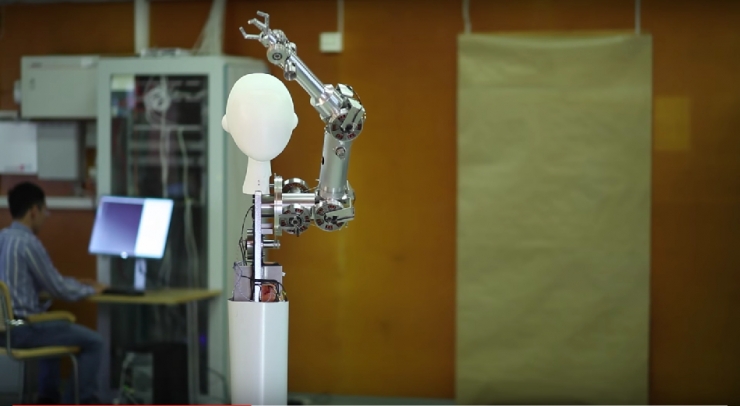 Robot Eve is what we use force control to build from scratch. We want it to be as agile and efficient as humans. Next, we will talk about the reasons why Eve was created. These ideas may provide some inspiration for us from the shackles of industrial manufacturing.
Robot Eve is what we use force control to build from scratch. We want it to be as agile and efficient as humans. Next, we will talk about the reasons why Eve was created. These ideas may provide some inspiration for us from the shackles of industrial manufacturing.
Some background
In 1987, Pål Løken, the founder of Halodi Robotics, studied at a technology university. He witnessed the birth of a new generation of industrial robots. At that time, people were eager to see cheaper, smaller commercial robots and thought that the arrival of such robots was just around the corner. However, about 30 years later, we are still looking forward to looking forward to. When Pål thought it was time to witness the birth of intelligent and inexpensive consumer robots, we created Eve.
When we were preparing to build Eve, we first studied the traditional manufacturing method of harmonic gears and high-speed motors. It is well-known that most of this technology is used in the production of industrial robots. However, we realize that this technology will increase the cost, while limiting the operation and controllability of the robot.
In the past thirty years, while the shrinking technology has been gradually developed, the basic actuation mechanism of the robot controller has been stagnated. Even those innovative collaborative robots are still using harmonic gears and high-speed motors to actuate.
Here are some of the factors that we considered when we built Eve:
Friction
In the operation of gears, the balance between clearance and friction needs to be selected, while in the robot technology, the low gear clearance point can obtain better accuracy and reproducibility. This will cause the engine itself to produce extremely high friction. In addition, the friction is determined by the ratio of gears, and the smallest one is generally 100:1. To realize that, now, friction and gear clearance cannot be accurately molded.
Reflection inertia
When the gears drive the engine at a speed of 100:1, the rotors and rods need to rotate 100 times faster than the meshing point. Because the movement force is running at the square of the speed, the inertia is the square of the total gear ratio, so it is 10,000. This means that even very light rotors and rods can make the robot arm very insensitive to external forces.
Drive arm force
The driving robot arm force is the energy directly transmitted from the external environment to the engine, so the driving robot arm force reflects the controllability of the power in the external environment. At the same time, the driving robot arm force is also controlled by the friction force and reflection inertia.
our way
In traditional robot control, the absence of a driving robot arm force can be regarded as an advantage. By controlling a gear that operates at a high altitude, the nip point is highly compressed and separated so that it can resist external pressure. This method has excellent positioning accuracy and speed control, but it is not compatible with the contact force, so we want to ensure its high accuracy, and equipped with some bounce / shock absorber system.
Under normal circumstances, the next step is to solve the problem of control, which has made great progress in the past few years, but the results of the research still remain in the academic world - generally only the imitation system, because the great Friction and gear clearance make it impossible for robots to use these controllers efficiently. The force of control allows them to generate the optimal torque required by the engine by manipulating different formulas. This produces a lot of softer, more efficient power, including contact pressure.
Obviously, the home robot must be a full-control robot, and its snapping point must have more driving robotic force.
Will a low total gear ratio robot arm be stronger than a human arm?
We have conducted a survey on commercial engines on the market. The answer is no, many engines are only suitable for medium to high speed operation. This is because efficiency increases with the number of rpm, and the reduction in thermal power becomes less—this assumption is not true considering the conditions of the entire system. In systems where gears operate at high speeds, much of the energy is consumed by friction and gear clearance, which makes overall efficiency much lower than engine efficiency. If we can make an engine with metal collars, driving the arm forces can let the external environment and the energy flow before the engine consume less, so that we can regain this energy through regenerative braking to compensate for the loss of thermal power. In robotics, this principle holds true because many movements start with almost the same amount of energy.
After reading a large number of books and research results, we believe that the next breakthrough in engine technology is in metal collars, not speed. Finally, we have developed advanced engine technology that allows the weight ratio of the engine to be four times the metal collar on the market.
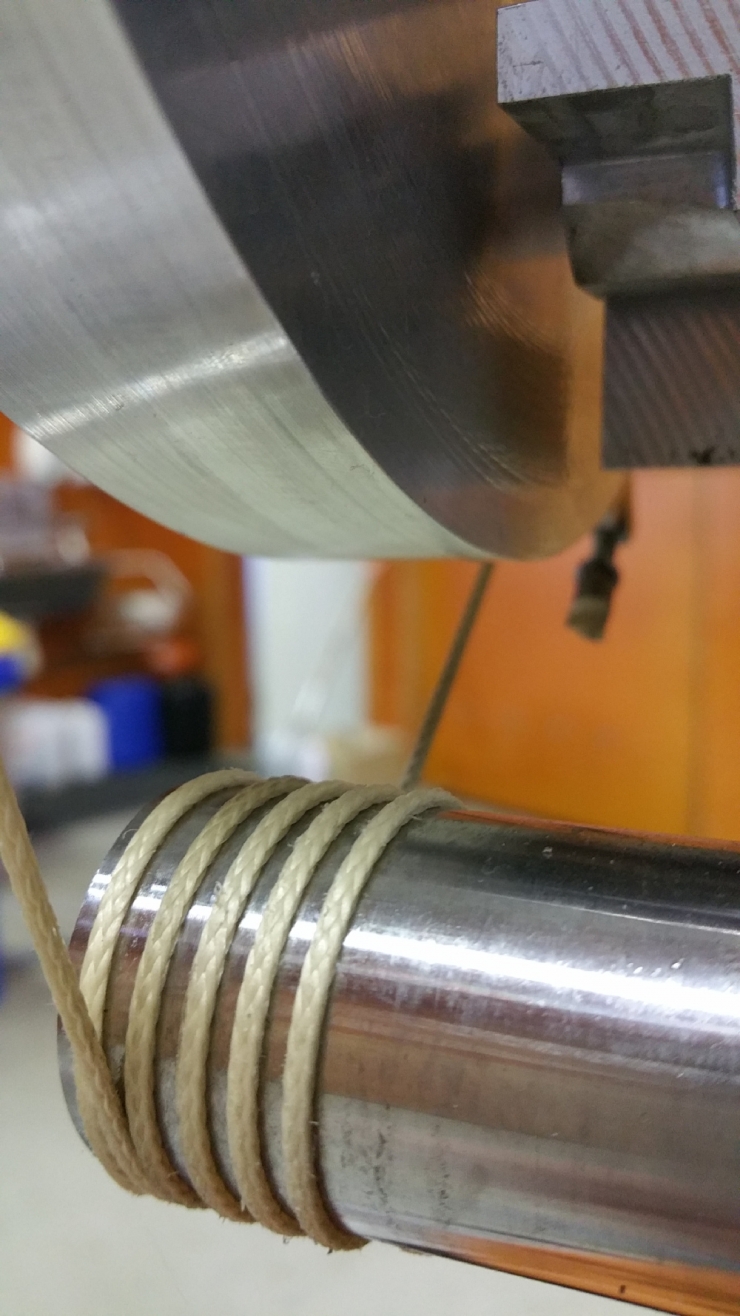
 With the metal collar on the engine, we started to develop REVO-1. Drawing on the inspiration from the field of tactile sensation, we have adopted a cable-driven differential transmission.
With the metal collar on the engine, we started to develop REVO-1. Drawing on the inspiration from the field of tactile sensation, we have adopted a cable-driven differential transmission.
REVO-1 works by a set of hybrid cables that are unfixed at each transfer point. We have spent a lot of time determining that the geometry of the cables and their wraps will not cause the cables to deform, which allows us to pull the cables. Long length of gear to zero. In addition, the nearly perfect geometry allows the cable to never be deformed and the friction is close to zero without any noise. The last step is to have a variety of occlusal points and be driven by different cables. In addition to compressing the bite point and moving more weight to the kinematic chain, it also allows a pair of engines to share energy – which makes the robot twice as strong!
 In addition, this makes Eve's friction and inertia very low, as low as you touch with your finger, you can easily move her. Even if all the energy is transferred to the engine, she can withstand all kinds of pressure without any injury.
In addition, this makes Eve's friction and inertia very low, as low as you touch with your finger, you can easily move her. Even if all the energy is transferred to the engine, she can withstand all kinds of pressure without any injury.
Because we have full control of power, we know how the arm should move and any deviation from it before the external force, which allows us to create a 7-DOF robotic arm.
About the cost
Eve is a very complex machine whose appearance is aluminum, iron and composite cables. E-Ink displays, FPGAs, IMUs, and other sensors are all mass-produced and inexpensive, which makes the cost of engines, drivers, and encoders relatively expensive. Because they are the products of in-house manufacturing, we focused on production feasibility from the very beginning. Ensuring low prices makes us believe that in the future we can achieve price-led sales goals.
After the test began, we were pleasantly surprised to find that the robotic arm moved about 2 to 15 watts without loading. For robots with unlimited movement, the consumption of energy is critical. The size of the battery is also a key factor in the cost.
How do you view collaborative robots on the market today? They also use reversal as a selling point?
To achieve inversion, there are the following key points:
1. Simulate the use of force sensors to virtually convert external energy;
2. Compatible with bouncing devices with flexible actuators;
3. Low total gear ratio (about 100 or so), so that a huge external force can be converted.
Although it can operate well at low speeds, it cannot yet simulate the agility and speed of human arms during interaction with the outside world.
Our robots have really achieved reversal and low friction. In terms of mechanical operation, it can move objects in the control software - which means that Eve's prospects are very bright, and we hope that in the coming years, we will be able to interact with academics as well. The robot community worked together to push its sensitivity and speed to the limit.
What's next for the robot?
At present, we are looking for investors to help build Eve's cloud brain so that she can push her from product prototypes to large-scale industrial production. In such a robot that combines power and low prices, we want to create an ecosystem in her brain. We want to make Eve smart to know how to navigate and analyze the surrounding environment, notice where the objects are, and be able to grasp them accurately. With this information, it can perform more complex compound tasks - this will be implemented in a crowdsourced way in the cloud's App store. For more information, please click
At present, we are developing the second version of the Eve prototype, mainly to show it to everyone. Well, please continue to follow us!
Via robohub